
Tärni topoloogia on võrgu topoloogia tüüp, milles kõik seadmed on ühendatud keskse jaoturi või lülitiga. Rõnga topoloogia on võrgu topoloogia tüüp, milles kõik seadmed on üksteisega ringikujuliselt ühendatud. Erinevalt ühe keskse jaoturiga tähttopoloogiast on rõnga topoloogia väga usaldusväärne.
Võtme tagasivõtmine
- Tärni topoloogias on iga seade ühendatud keskse jaoturi või lülitiga, samas kui ringtopoloogias on seadmed ühendatud suletud ahelas, kusjuures iga seade on ühendatud oma kahe naabriga.
- Tärni topoloogiaid on lihtsam tõrkeotsingut teha ja laiendada kui ring topoloogiaid, kuna üksikuid seadmeid saab lisada või eemaldada ilma võrku häirimata.
- Helina topoloogiad pakuvad paremat tõrketaluvust ja saavad hakkama suurema liikluskoormusega kui tähttopoloogiad, kuid nende haldamine ja ümberkonfigureerimine on keerulisem.
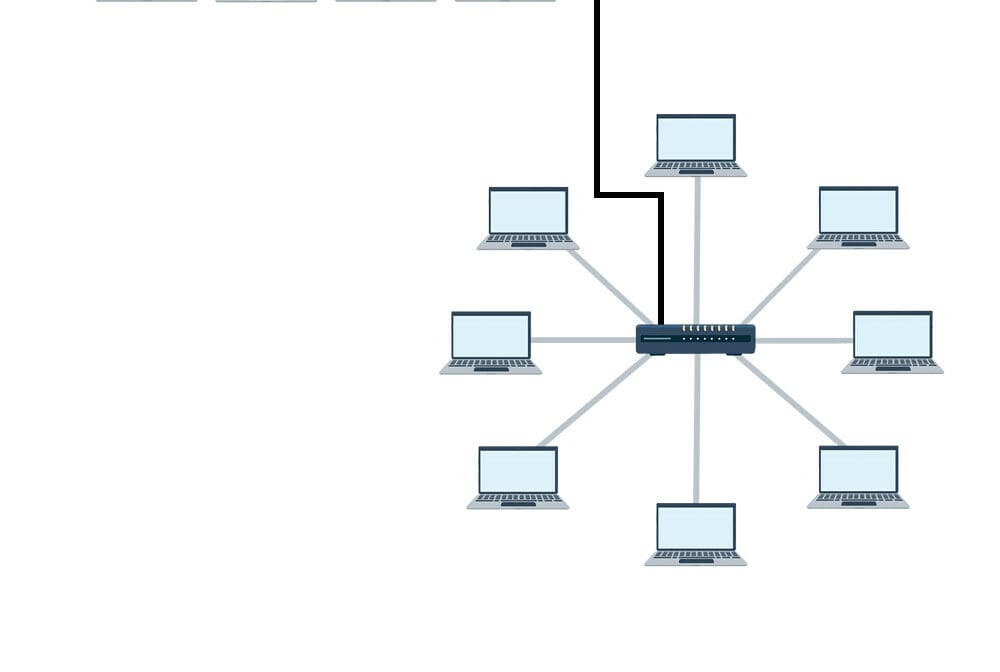
Mis on tähetopoloogia?
Tähetopoloogia on kuulus ka tähevõrguna. Tegemist on arvutivõrguga. Selles võrgus on erinevad seadmed ühendatud tsentraalselt. See on kõige levinum arvutivõrgu tüüp. See on ka kõige populaarsem topoloogiavõrk.
Kõik seadmed on ühendatud keskse võrguseadmega. Tähevõrgus peavad andmed enne sihtkohta jõudmist liikuma kesksõlme. Tähevõrk erineb võrgutopoloogiast ega saa seadmetega otse suhelda. See võrk suhtleb jaoturi või kommutaatori abil või ruuter.
Keskselt jaoturiga ühendatud seadmeid nimetatakse hostideks või klientideks, samas kui keskne võrguseade toimib serverina. Star-võrgukaart on arvutisse installitud ja RJ-45 või koaksiaalkaabel kasutatakse selles võrgus.
Tähevõrk on elementaarne, lihtne ja hõlpsasti loodav. Meie igapäevaelus on mitmeid näiteid tähevõrkudest. Haiglate, lennujaamade, pankade, haridusasutuste ja kontorite võrgud on tähtvõrgud või topoloogia.
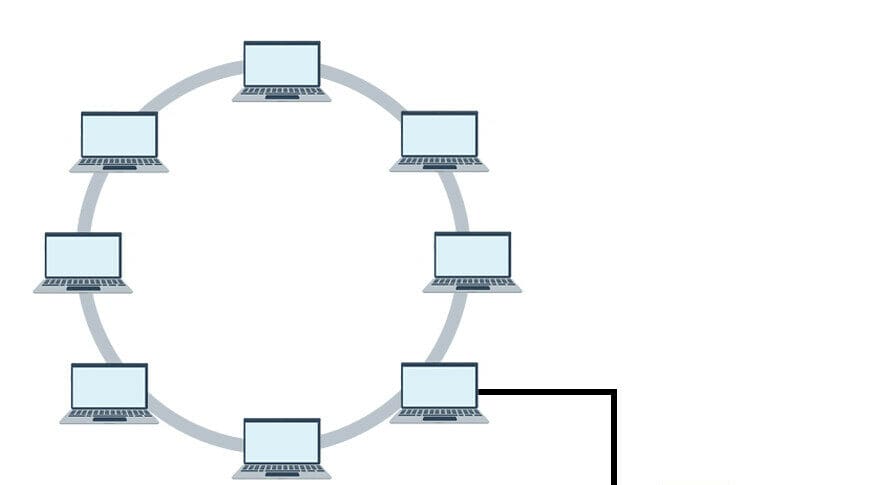
Mis on rõnga topoloogia?
Rõngatopoloogiat nimetatakse arvutivõrkudes ka ringvõrguks. See on võrk, milles iga seade on ühendatud kahe seadmega mõlemal küljel. Seadmed on ühendatud RJ-45 kaabli või koaksiaalkaabli abil rõnga kujul.
See moodustab ringikujulise võrgu, mida nimetatakse ringvõrguks. Rõngavõrgus olevaid andmeid edastatakse ainult ühes suunas. Andmeedastus on ühesuunaline ja andmeedastus ühesuunaline teisele ettenähtud seadmesse.
Samuti on olemas kahesuunaline ringandmevõrk, mis liigub mõlemal pool. Helina topoloogias pole võrguühenduse jaoks heliserverit vaja. See on kiirem võrguvorm. Seadmeid saab lisada ringvõrku, mis ei mõjuta selle tõhusust.
Suure liiklusega või ulatuslikumad võrgud on ühendatud ringtopoloogia kujul. Seda kasutatakse peamiselt kohtvõrkudes. Enamik rõnga topoloogia ühendusi on näha kolledžites, koolides või kontorites.
Erinevus tähe ja rõnga topoloogia vahel
Tärni- ja rõnga topoloogia on arvutivõrgu tüübid, mida kasutatakse kohtvõrgu ühenduvus. Tähe- ja rõngavõrkude vahel on mõned erinevused, mis on järgmised.
Star topoloogias on arvutid ühendatud keskse jaoturiga, mida nimetatakse serveriks, ja andmed saadetakse jaoturisse või ruuterisse, mis edastatakse sihtseadmesse. Seevastu ringtopoloogias on seadmed ühendatud mõlemalt poolt, milles andmeedastus on ühesuunaline. Suur hulk seadmeid ring topoloogias saab ühendada.
võrdlus Tähe ja rõnga topoloogia vahel
| parameetrid | Täht topoloogia | Sõrmuse topoloogia |
|---|---|---|
| Määratlus | Erinevad seadmed on selles võrgus tsentraalselt ühendatud jaoturi või ruuteriga. | See on võrk, milles iga seade on ühendatud kahe seadmega mõlemal küljel. |
| Efektiivsus | Tähevõrgus võib keskjaoturi rike mõjutada kogu võrku. Kuigi üks seade ei saa mõjutada kogu süsteemi. See on kiire ja lihtne võrk. | Helina topoloogias võib ühe seadme rike mõjutada kogu võrku. See on aeglasem kui tähtvõrk ja võrgu loomisel keerulisem. |
| andmeedastus | Tähevõrgus peavad andmed jõudma läbi jaoturi sihtseadmetesse. | Enamasti on andmeedastus rõnga topoloogias ühesuunaline. |
| Maksma | See on kulukas liinivõrguühenduse tüüp. | See võrk nõuab vähem kulusid kui tähttopoloogia. |
| Kasutus | Seda kasutatakse paljudes lennujaamades, haiglates ja pangandussüsteemides. | Seda kasutatakse haridusasutustes või seal, kus andmeedastus on ühesuunaline. |
| Probleemid | Seda tüüpi võrku on lihtne tõrkeotsingut teha. | Seda tüüpi võrku on raske tõrkeotsingut teha. |
- Ahronovitz, E., Aubert, JP ja Fiorio, C., 1995. Star-topology: a topology for image analysis. sisse DGCI: Diskreetne geomeetria arvutipildi jaoks.
- Li, X., 2009. Nišeerimine ilma nišimisparameetriteta: osakeste sülemi optimeerimine rõnga topoloogia abil. IEEE tehingud evolutsioonilise arvutuse kohta, 14(1), pp.150-169.
Viimati värskendatud: 29. juulil 2023

Sandeep Bhandaril on arvutite bakalaureusekraad Thapari ülikoolist (2006). Tal on 20-aastane kogemus tehnoloogia vallas. Ta tunneb suurt huvi erinevate tehnikavaldkondade, sealhulgas andmebaasisüsteemide, arvutivõrkude ja programmeerimise vastu. Tema kohta saate tema kohta rohkem lugeda bio-leht.






